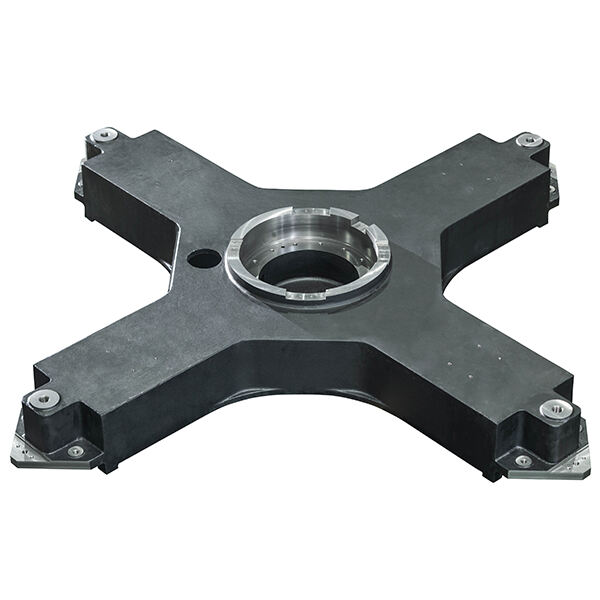
ما بخشی از زندگی روزمره روباتها هستیم که ما را احاطه کردهاند. به میزانی که شاید حتی نتوانید آنها را تشخیص دهید. اینطور که چگونه میتوانیم خانههایمان را با شوید و حتی در عمل جراحی کمک میکند. اما آیا توجه کردهاید که روباتها چگونه حرکت میکنند؟ پایه روبات، بنیادی است که روبات میتواند بر آن حرکت کند و تأثیر قابل توجهی در میزان عملکرد یا موفقیت هر روبات دارد. فرض اینکه تمام عوامل دیگر برابر باشند، پایه ربات از سه قسمت اصلی تشکیل شده است که با هم کار میکنند تا به روبات توانایی حرکت بدهند: چاسیس، موتور، چرخ. چاسیس، قاب ساختاری خانه است که همه چیز را ثابت نگه میدارد و حمایت میکند. موتورها که واقعاً نقشی ایفا میکنند، میتوانند به عنوان عضلات روبات در نظر گرفته شوند که انرژی آنها را فراهم میکنند و اجازه میدهند با چرخاندن چرخها حرکت کنند. چرخها کمک میکنند تا روبات حرکت کند و دور بیاید. برای حرکت با کارایی بالا، نیاز به پایه روباتی قوی و محکم است.
برای اینکه ربات به درستی کار کند، باید پایهای قوی و پایدار داشته باشد. اگر پایه پایدار نبود، قطعه از بین میرفت یا اگر عمودی بود و کمی مایل شد وقتی او بلند میشد، فقط روی دو چرخ ایستاده نمیماند بلکه به سمت عقب میخورد و شکست میخورد. خوب نیست. پایهای محکم پینگچنگ پایه موبایل ربات در مقابل، قادر است وزن تمام مولفههای خود مثل موتورها و حسگرهای را حمایت کند تا در حال تغییر موقعیت جابجا نشود.

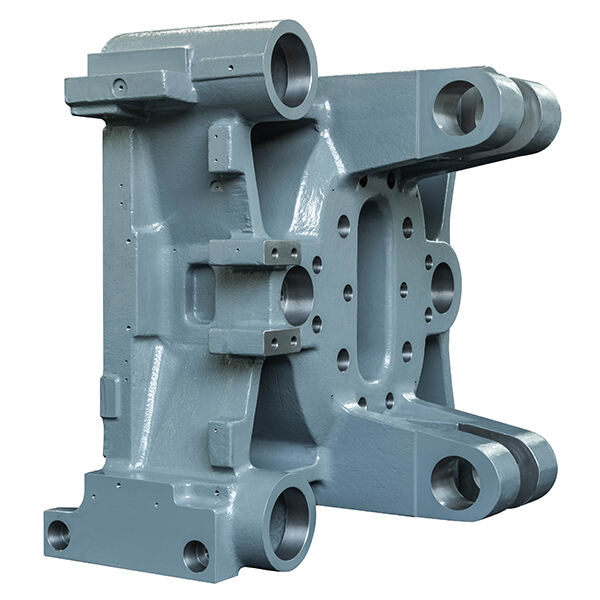
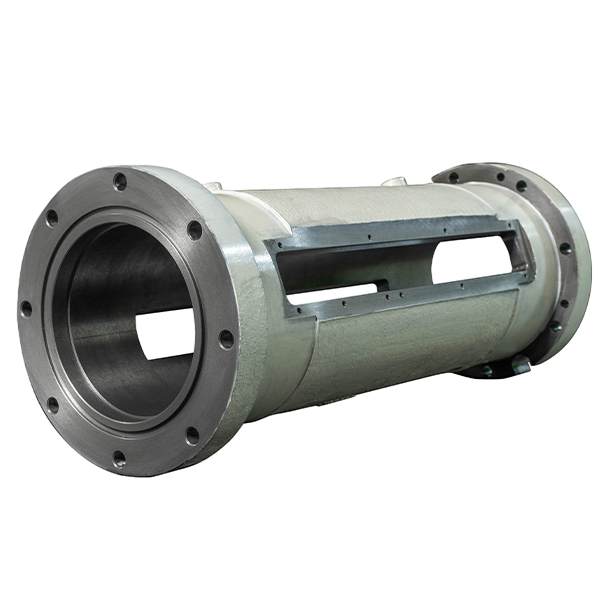
پایههای ربات به چندین نوع مختلف وجود دارد، اما دو نوع پایه رایجترین عبارتند از دارای چرخ و دارای پا. پایههای دارای چرخ به دلایل آشکاری محبوبتر هستند زیرا آنها را سادهتر است بستهبندی کرد، ساخت و کنترل کرد. پینگچنگ، طراحی پایه اولیهای دارد، فقط شامل موتور چرخها و قاب است. از طرف دیگر، پایههای دارای پا پیچیدهتر هستند و بنابراین طراحی آنها سختتر است به دلیل اینکه آنها روی پاها در حال حرکت هستند نه چرخها. نکته قوت آنها توانایی استفاده از اصول مختلف حرکت است و میتوانند در زمینهای خشک یا نامساوی (رباتهای با پا) حرکت کنند. اما رباتهای دارای دودوله کمتر از برادران چرخدارشان کارآمد هستند و باید عمر باتری توسط سازندگان در نظر گرفته شود. پایه فلنج در اینجا برخی از جنبههای مهمی که باید در هنگام طراحی و ساخت یک پایه ربات در نظر گرفته شود ذکر شده است. ابتدا، هر وزنی که برای ربات مناسب باشد باید به گونهای باشد که نتواند در حال حرکت ظاهر شود.
اینجا برخی از نکات مهمی که باید در هنگام طراحی و ساخت یک پایه ربات مد نظر قرار دهیم وجود دارد. ابتدا، هر وزنی که برای ربات مناسب باشد باید به گونهای باشد که نتواند در حال حرکت ظاهر شود. روبات پایه موبایل تعادل برای کار به درستی روبات و نگه داشتن آن در وضعیت عمودی ضروری است. دوم، اینکه روبات باید چه کاری با موقعیت جدید خود انجام دهد. دارای چرخ - برای سطوح مسطح و هموار پا - برای قدم زدن روی زمینهای نابرابر یا خشکو خشک

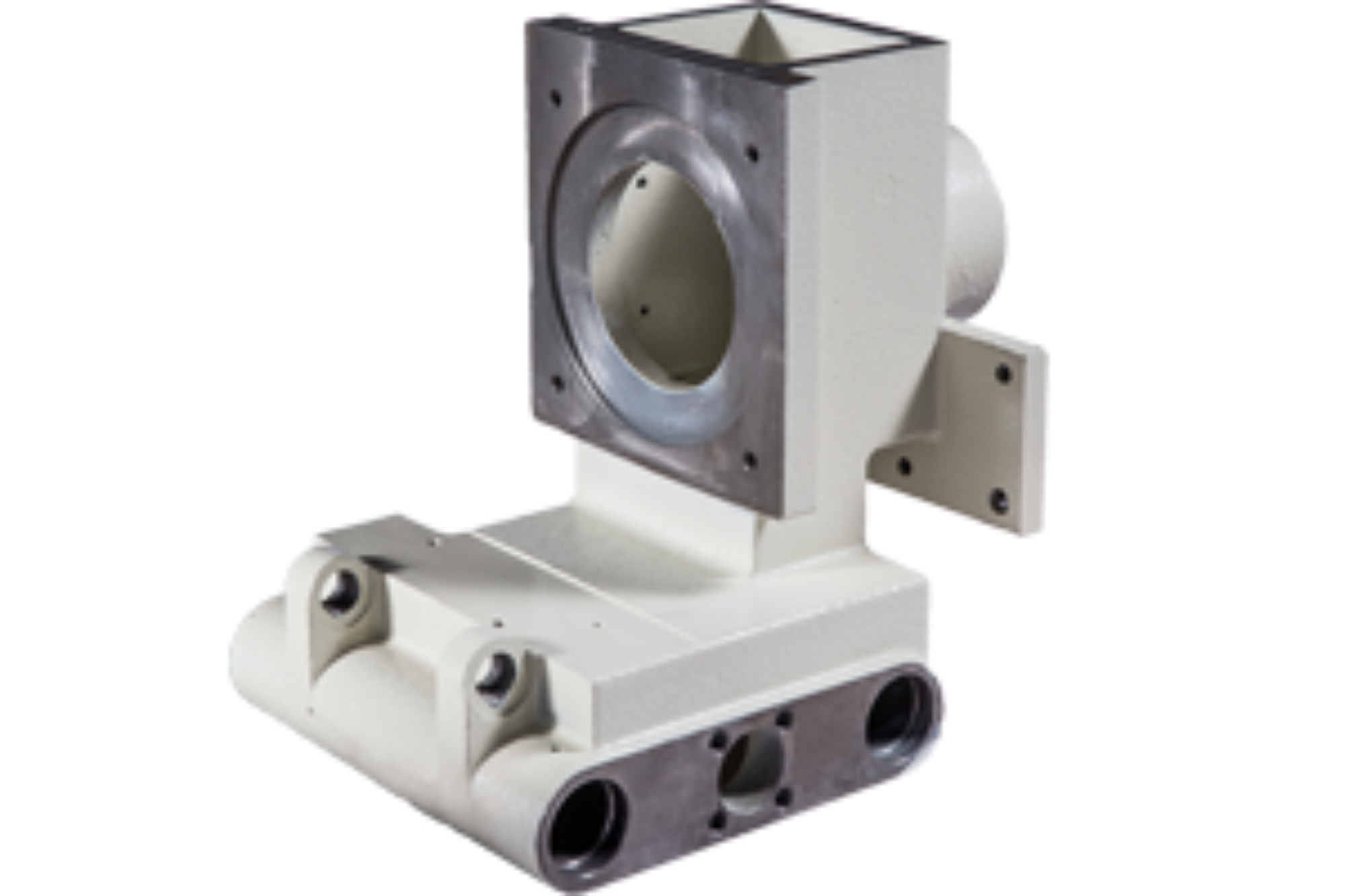
یک عامل مهم که باید در نظر گرفته شود منبع توان ربات است. ربات باید قدرت کافی داشته باشد تا تمام مولفههای خود را حرکت دهد، به عنوان مثال موتورها و حسگرهای لازم یا الزامی برای اینکه بتواند فهمد که آنها در کجا قرار داده شدهاند. پینگچنگ پایه بازوی ربات باید قدرت کافی داشته باشند تا ربات را حرکت دهند و کارآمد باشند تا مصرف بهتر انرژی ایجاد شود که باعث میشود باتریها طولانیتر بمانند.
پینگچنگ پایگاهی برای رباتها و شرکای چرخه عمر است. تأمین محصولات تنها آغازی برای همکاریهای ما محسوب میشود. خدمات مشتریمحور ما مرهون اطمینان از رضایت شماست. ما بیش از ۲۰ سال است که خدمات ماشینکاری ارائه میدهیم و همکاریهای نزدیکی با شرکتهای معتبر ژاپنی در صنایع مختلف برقرار کردهایم. با تکیه بر دههها تجربه و دانش تخصصی در این حوزه، پینگچنگ متعهد است تا قیمتهای منصفانهای را به مشتریان خود ارائه دهد. پس از دریافت درخواستهای نقلقول، طرحها را با استفاده از نرمافزارهای پیشرفته بررسی کرده و سپس بهترین راهحل را با قیمتی منطقی ارائه میکنیم.
پایه ربات پینگچنگ بر اساس دههها تجربه صنعتی و درک عمیق تأسیس شده است. پس از دریافت درخواست قیمت، ما طرح را بررسی و در نرمافزار اختصاصی شبیهسازی میکنیم و سپس بهترین راهحل را با قیمت منصفانه ارائه میدهیم.
پینگچنگ اکنون پایگاه ربات و ۵۰ کارمند فنی بسیار ماهر است. این شرکت تلاش میکند محصولاتی با کیفیت بالا ارائه دهد. سپس محصولات توسط ابزارهای اندازهگیری میتسوتویو و دستگاههای CMM که بهطور دورهای کالیبره میشوند، مورد بازرسی قرار میگیرند. این بررسی دوگانه، کیفیت را قابل اعتماد و دقیق نگه میدارد. ماشینکاری و مونتاژ قطعات مهم تحت کنترل و قابل ردیابی است.
پینگچنگ متعهد به کمک به مشتریان خود در دستیابی به اهداف تجاریشان از طریق راهحلهای زنجیره تأمین و خدمات خود است. ما بر کمک به گسترش و پایگاه ربات محصولات شما تمرکز داریم. پینگچنگ تولیدکنندهای قابل اعتماد است که به دنبال آن هستید. ما تأمینکنندهای مطمئن از فرصتها هستیم.

پینگچنگ در زبان چینی به معنای امن و موفقیت است. ما امیدواریم شرکت ما آینده روشنی داشته باشد. و نام در زبان ژاپنی نشان دهنده نام دوره هایسی است که ثابت میکند ما از هر تنشی گذشتهایم اما همچنان کیفیت بالا و پایداری را حفظ کردهایم. پینگچنگ تولیدکننده قابل اعتمادی است که دنبال آن بودید.
دorp اوزهوانتشن، منطقه شیائوشان، هانگژو، استان زheجیانگ، چین
حقوق کپیرایت © شرکت ماشین پینگچنگ هانگژو. همه حقوق محفوظ است سیاست حفظ حریم خصوصی
 EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 SK
SK
 SL
SL
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 GA
GA
 CY
CY
 IS
IS
 KA
KA
 LA
LA
 MI
MI